


CAE仿真软件RADIOSS在汽车侧碰仿真的分析与应用
1、引言
车辆侧面碰撞是发生率较高的交通事故形式,统计数据表明全世界约有30%的严重交通事故都与侧面碰撞有关,因此车辆侧面碰撞成为汽车被动安全性研究的重要内容,也越来越多的受到政府、汽车制造商,以及消费者三方共同关注。作为汽车企业,为满足消费市场的碰撞安全法律法规要求,以及越来越严格的新车碰撞安全星级评价(NCAP)要求,已经广泛采用虚拟仿真技术来解决真实的车辆碰撞问题。
在一些实际的侧面碰撞事故中,出现过车辆碰撞过程中存在车门开启的情况,这必然造成车内乘员被甩出车外的危险,直接影响乘员的生命安全。故在中国的法规GB20071-2006的特殊要求中4.3.1条规定:在碰撞试验过程中,车门不得开启;而对于欧盟的法规ECER95的5.3.1条也有着相同的要求。除了法律法规对车门开启有着这样要求,NCAP也有着对此更为严格的评价,例如中国2012版C-NCAP的2.1.3.3条有总体罚分项规定:对于两侧的每一个车门,若在碰撞过程中开启,则分别减去1分;而欧盟EuroNCAPV6.0中4.2.4条规定:侧碰试验中每开启一个门(车门包括后背门和天窗),则总得分扣掉1分,且门开启的修正得分不受车辆总得分的限制。鉴于以上法律法规和NCAP的要求,针对侧面碰撞,一般可采用商业有限元分析软件包RADIOSS、LS-DYNA、PAM-CRASH等进行相关仿真求解。
2、多域求解的原理
商业有限元软件通常采用显示有限元方法来求解汽车碰撞的大变形非线性问题,而显示时间积分求解就涉及到时间步长问题,只有时间步长小于临界时间步长时,计算结果才能稳定。临界时间步长求解公式如下:
其中c为在材质中的传播速度,l为单元的特征长度。材料波速c是与材料的杨氏模量E,泊松比ν和质量密度ρ的函数,而不同维数的单元,其特征长度受实际单元尺寸大小影响。而汽车常用金属材料钢和铝,其传播速度为5000m/s左右,故若时间步长为1us,则单元的特征长度为5mm。由此可知,单元尺寸越小,其时间步长也越小,故而在有限的计算资源条件下,所花费的计算时间也就越多。通常在汽车碰撞仿真计算中,需要合理控制模型中最小的单元尺寸,减少相应的质量增加,才能在较短时间内提供正确的计算结果,满足工作需求。
在侧碰中门开启影响因素中,除了受到车身侧围结构变形影响之外,门锁系统结构强度和空间布置等也影响着门体开启。故对于门锁结构建模就需要细化和详细,有别于车身结构的单元尺寸,如图1所示的某款车型的门锁结构简化模型和细化模型。由于门锁细化模型单元尺寸在1mm左右,故而减小计算整车的时间步长,增加计算时间,给工程应用上带来一定的麻烦。为此Altair在RADIOSS求解器中提供了多域求解技术来解决同一个模型涉及到时间步长不一致的问题,以满足局部细化部件求解。其工作原理为RADIOSS分别使用各自的子域模型的时间步长求解计算独立的子域模型,然后在主控程序(RAD2RAD)的稳定约束条件下计算各自子域模型之间相互传递的力和力矩,如图2所示。
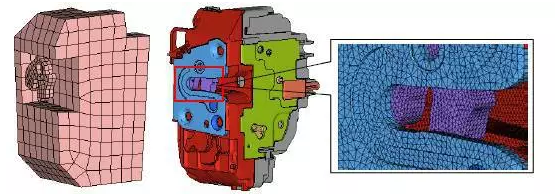
图1门锁结构的简化模型(左)、细化模型(中)和其局部的细节(右)

图2RADIOSS多域求解流程
3、侧碰仿真模型的建立
侧碰后门开启的仿真模型主要有整车模型,后门锁系统子模型,以及侧碰移动可变性壁障(MDB)组成,如图3所示。MDB模型由Altair公司提供,并经过相应的对标和验证。采用RADIOSS的多域求解技术需要对子域模型的建立、连接以及接触等重新定义,下面将逐一进行说明。
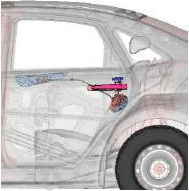

图3侧面碰撞仿真模型
(1)门锁子域模型的建立
后门锁子模型包含有门锁机构、锁体拉线,以及内、外开把手机构等,见图3a所示。为了区分子域模型,通过RADIOSS的前处理软件HyperCrash在主域中定义一个门锁系统的子域RR_Door_Lock_System,其关键字为/SUBDOMAIN。为了后续操作方便,可将子域模型建立个Part集合(/SUBSET)。由于门锁内部开启机构较为复杂,为了模拟开锁机制,工程上可采用调节拉线行程来控制锁舌的旋转开启。由设计部门可获知内、外开拉线开启力分别为35N和25N,由此转化内、外拉线行程分别在14mm和10mm,当两者达其一就可将门锁打开。通过在内、外拉线处分别设定带有一定刚度的弹簧单元作为锁舌扭转弹簧开启的必要条件,并由相应的传感器(/SENSOR/OR)参数来控制判定,以此实现门锁开启仿真,如图4所示。
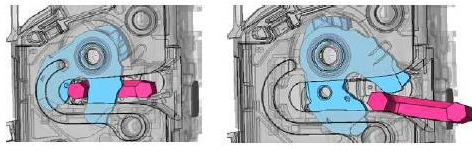
图4门锁开启前状态(左)和门锁开启后状态(右)
(2)门锁子域模型的连接
子域模型与主域模型的连接,RADIOSS提供了两种方式:共节点法和接触法。前者是简单地将交界处节点自动映射到子域,实际操作需要劈分三角形单元完成共节点过度;而后者采用Tied接触(/INTER/TYPE2)方式将子域边界节点与主域边界的粗网格绑定在一起,而其在RADIOSSv11.0.240以后版本才支持。本文计算模型采用前者方式定义后门锁与门体之间的连接。
(3)门锁子域模型的接触
由于采用多域求解,故在定义接触时,除了整车自接触和整车与MDB的接触这些常规的接触外,还需要额外定义后门锁子域的自接触、后门锁子域与MDB的接触,以及后门锁子域与整车的接触。在定义后门锁子域与整车的接触(/INTER/TYPE7)时,需要注意两点:其一,后门锁子域和整车定义接触时,整车侧选择范围要合理,保证有效接触;其二,若后门锁子域与整车采用TYPE2接触做连接,此处节点位置不满足Gap条件,故需要去除周边一圈连接单元。
以上仅是子域模型的建模说明,若要调用多域求解计算还需要对RADIOSS的Engine文件做相关的调整,见表1所示。
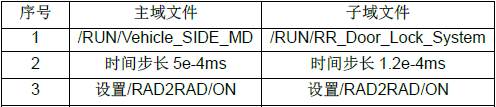
表1主域和子域的Engine文件的设置
4、计算结果
整个侧碰模型建立完成,采用RADIOSS进行相应的求解计算,通过结果文件重点考察分析了后门锁系统的变形和拉线受力情况,以此判断在侧面MDB碰撞过程中后门体是否存在开启的情况。
(1)锁体结构变形
锁体结构完整性是考察侧碰中门开启条件之一,若是锁体结构无法承受侧碰的撞击力而失效,则门体必然会开启。通过观察锁体结构的塑性应变,锁体整体结构没有受到破坏,完整性较好,而是在圆圈区域处结构受力较大,其应变值超出材料的屈服值,如图5所示。
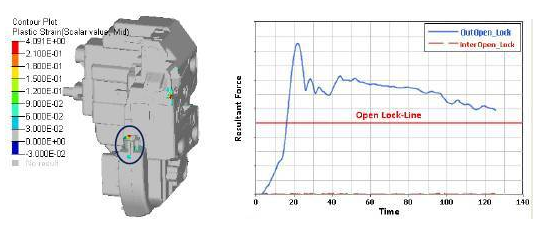
图5锁体的应变云图 图6拉线受力时间历程图
(2)拉线受力
由图5锁体应变云图可知,在圆圈区域即外开拉线与锁体连接处,应变值较大,这说明此处的外开拉线受力也比较大。输出拉线的受力时间历程如图6所示,从图中可看出外开拉线受力值在16ms之后已达到其开启力,说明后门存在开启风险;而内开拉线由于受力很小,对后门锁开启基本无影响。
进一步对外开拉线受力分析可知,外开拉线除了与锁体连接之外,另一端同外开把手的转动机构相连,由平衡块来控制外开把手的开启,由此可知平衡块所受到惯性力较大,是引起后门开启的原因之一,如图7所示。而外开拉线受力也可以受到门体钣金件变形挤压的影响,同样也会带动锁体内部锁舌转动打开车门。
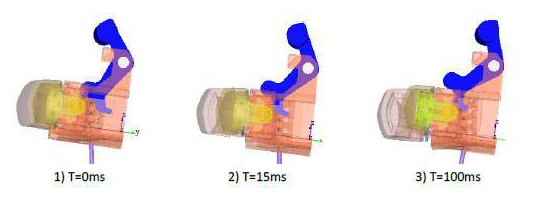
图7外开把手的平衡块运动状态(后视图)
考虑到更改车身结构来减小拉线受力方案,会带来开发周期长,成本大等影响,故建议对门锁结构系统进行相关优化,可以对平衡块结构进行优化设计,减少相应质量,以便减小惯性力;或是对拉线布置进行相应的优化,增加长度,减弱拉线受力。
最后将侧碰后门开启仿真分析结果以及改进方案同设计部门进行沟通反馈,设计部门综合采纳以上相关建议,对门锁结构设计进行相应的优化设计。而在此之后的相关侧碰试验中也验证了分析的正确性,未曾发生过侧碰后门开启的情况。
5、结论
本文利用RADIOSS多域求解的技术,建立后门锁机构的子域模型,模拟后门开启过程,通过仿真结果分析后门开启的原因,并提供相关的解决方案,有效的支持设计开发,减少后期设计变更和试验费用。
本文只是在汽车侧碰仿真应用的例子,其实RADIOSS多域求解可以应用在更多的汽车局部精细仿真模拟方面,例如行人保护头部碰撞仿真中的雨刮结构模拟、气囊展开仿真的仪表板撕裂缝模拟等等,以有效的虚拟仿真手段帮助设计部门再现动态过程和支持进一步的优化改进。
本文出自深圳有限元科技有限公司官网:www.featech.com.cn 转载请注明

