接触仿真分析的基本原理是什么?(3)
有限元:
2017-05-24 10:15:51
阅读数:
4265
分享到:
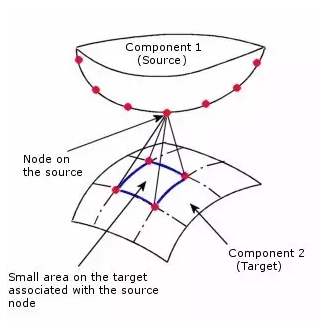
有了接触控制方程,下面就是要进行离散化。这里我们以node-to-surface和罚函数法为例说说接触项的离散。Node-to-surface,顾名思义,两个接触面中,slave面由节点代表,master面由单元面代表。接触检测算法能保证每个slave节点至少对应一个master面,这就是所谓的接触单元。
不像平常我们遇到的结构单元,接触单元是没有实体对应的单元概念,其任务是在离散化的时候负责接触项的离散。换句话说,接触单元的任务是在离散模型中联系两个接触体并传递内力。所以,借用罚函数法的阐释,不妨把接触单元理解为接触体之间的弹簧或者胶水。有趣的是,“胶水”这个比喻恰恰是处理区域分解的Mortar法的意思,而Mortar法在surface-to-surface接触中应用非常多。要注意的是,根据搜索算法和几何构型情况,slave节点可以同时和多个master平面形成接触单元。
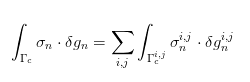
在把接触面离散为接触单元后,力平衡方程弱解形式中的接触项就变成了下面这个样子。意思是说,接触面上的虚功由slave节点和master单元面组成的接触单元构成。像上次一样,我们仍然只考虑最简单的没有摩擦的形式。
既然是基于位移的有限元,那么上面这个接触项就应该用位移来表示。所以,最后一步就是把形函数和等参元条件加进来。于是接触压力和接触体距离(gap)的变分表示为
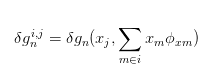
意思是说,在接触单元,接触压力是接触距离的函数(回忆一下罚函数法的弹簧概念)。接触距离是slave节点位置和master单元面表示。而master单元面又是由描述该单元的节点位置和形函数表示。所以这么一来大家都变回了位移-形函数的形式。这也是所有有限元离散的基本思路:控制方程-弱解-形函数表达。
于是至少现在我们在形式上把问题变得和常见有限元形式一致了。后面的就是组成刚度矩阵求解了。因为接触压力的表达形式也含有位移(再回忆下罚函数弹簧),所以通常要求解非线性方程,那于是就交给牛顿法了。
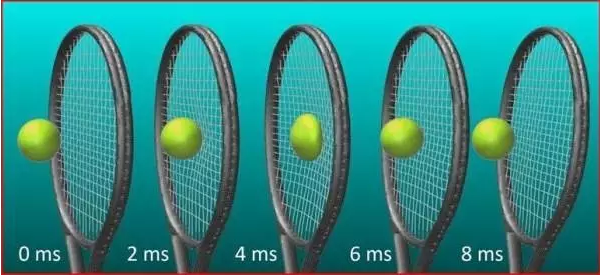
这个系列我们只说了最简单的情形:正面无摩擦接触和罚函数法。把滑动和摩擦加进来之后,问题还要纠结地多。另外,线单元与线单元的接触也有很多技术细节。上面说的方法的还有一个前提:用户事先定义接触体。但在实际应用中,还有很多问题事先是不知道谁和谁会接触的。比如说下图网球击打球拍的问题。动力模拟之前是不知道球体和哪根线单元发生接触的。于是现代求解器都朝着自动解除的傻瓜方向发展,比如说现在ABAQUS已经基本实现了,Ansys,OptiStruct等也在陆续实现。
本文出自深圳有限元科技有限公司官网:www.featech.com.cn 转载请注明




